 |
CANopenDemo
CANopenNode demo, tutorial and testing
|
Loading...
Searching...
No Matches
|
CANopenDemo
CANopenNode demo, tutorial and testing
|
Demonstration of CANopen device based on CANopenNode, which is free and open source CANopen Stack, based on (CiA301) standard.
demoDevice can run on different target devices. It contains object dictionary with most common communication parameters and some additional manufacturer specific and device profile parameters. Simple example program run from application interface and shows some principles of CANopenNode usage.
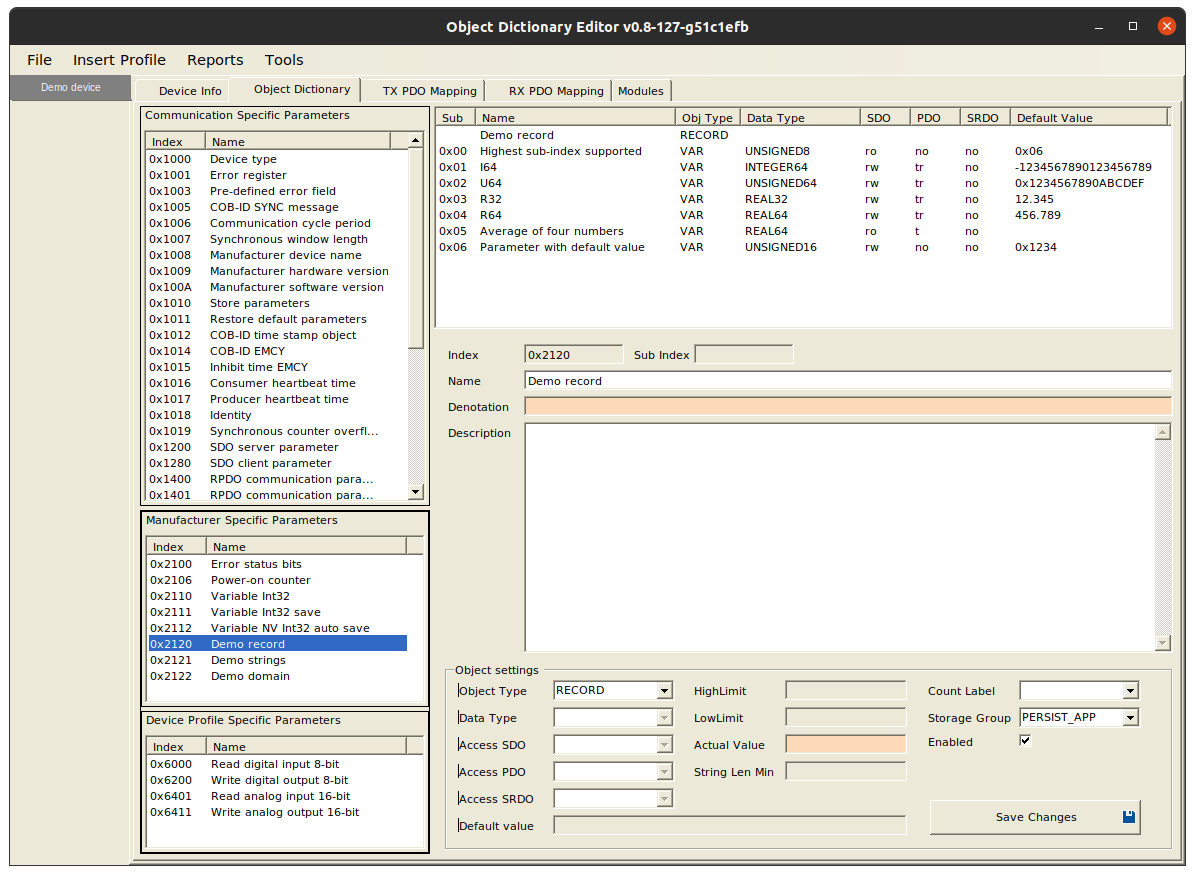
Object Dictionary is central part of CANopen device. It contains well structured communication, manufacturer specific or standardized device profile parameters, accessible by different types of communication. See picture below or complete OD documentation in demoDevice.md. Note also project file demoDevice.xdd, which can be opened and edited with EDSEditor.exe (Linux or Windows application). EDSEditor can export other files, including OD.h and OD.c source files for this example. demoDevice.xdd and demoDevice.eds are standard CANopen device description files and can be opened also with other CANopen tools.
Entry point into the program is similar to Arduino, extended with CANopen and additional real-time thread. It is similar for all target devices. There are several functions, which are called from main or realtime thread: app_programStart(), app_communicationReset(), app_programEnd(), app_programAsync() and app_programRt(). For details see CANopenLinux/CO_application.h. All code must be non-blocking. Application interface for demoDevice is in CO_application.c and contains calls to other examples.
See OD.h for several structures with OD variables. Structures are also used as data blocks, which can be stored into non-volatile memory on SDO command or automatically. Here is example of OD variable, which is incremented on program startup and is stored automatically:
OD_PERSIST_APP_AUTO.x2106_power_onCounter ++;
objectAssessOD.h and .c files contain example of programming style, which is used in all CANopenNode objects. No global variables are used, all used parameters are specified by objectAccessOD_t structure. One or multiple objects of type objectAccessOD_t are defined externally. This object is also passed as a first argument to all functions inside objectAssessOD.h.
Object is initialized by objectAccessOD_init() function. Function accepts second argument OD_entry_t *OD_demoRecord, which is entry from Object Dictionary with specified index. In our case it is Demo record at index 0x2120, which contains several different sub-entries (see picture above). This OD entry is extended with own IO access functions (OD_read_demoRecord and OD_write_demoRecord). This means, that every read (SDO, PDO or application) will use our access functions and not the original. (Original access functions reads from or writes to the original memory location, specified by the Object Dictionary.)
Subindexes 1 to 4 of the OD_demoRecord contain four "exotic" variables, which can be SDO read, SDO written, or mapped to RPDO or TPDO. They have default value, which is stored in the original memory location. Our IO access functions just redirects to the original access functions, when accessing those subindexes. In initialization phase pointers to those variables are stored for later calculations.
Subindex 5 contains "Average of four numbers". This is read-only parameter and is calculated as average number from subindexes 0..4. In Object Dictionary it does not have default value, so Object Dictionary does not assign memory location for it. Its value is calculated directly inside OD_read_demoRecord() function at the moment, it is read (by SDO, TPDO or application). Function objectAccessOD_readAverage() can be used by application for that purpose.
Subindex 6 contains "Parameter with default value". It is meant as parameter for our application, which configures our internalParameter. Lets say, our internalParameter has units micrometers and "Parameter with default value" has units millimeters. In the initialization phase "Parameter with default value" is read and internalParameter is calculated from it. In OD_read_demoRecord internalParameter is scaled to millimeters and copied to buffer. In OD_write_demoRecord value from buffer is scaled to micrometers and written to internalParameter. In addition OD_writeOriginal() is called, which writes the value also to the original memory location, specified by the Object Dictionary. This is necessary for storage to work.
All values from the OD_demoRecord (except subindex 5) are part of the OD_PERSIST_APP structure (see file OD.h). This structure is added to the storage module (see file CO_driver_custom.h). If any of the values from the OD_demoRecord changes and storage is requested by SDO write (to 0x1010,5 in our case), then values are preserved and are available on the next power-on cycle.
CO_identificators.h and .c files contain configuration of CAN bitRate and CANopen nodeId and OD objects 0x1008(manufacturerDeviceName), 0x1009(manufacturerHardwareVersion), 0x100A(manufacturerSoftwareVersion) and 0x1018(identity). CO_identificators_init() adds simple OD_extensions to objects containing strings, fills identity values and sets initial values to unconfigured nodeId and bitRate.
Global variables and definitions from OD.h are used, which is most simple and good enough in some cases.
domainDemo.h and .c files contain simplified example for CANopen domain data type. With this data type an arbitrary amount of data can be transferred. domainDemo_init() adds extension to OD_ENTRY_H2122_demoDomain with own OD_read_domainDemo and OD_write_domainDemo functions. If data size transferred is larger than internal buffer, then those two functions are called several times during SDO data transfer.
Internal variable dataSize configures size of data to be transferred from the device. First data byte transferred has value 0, next 1 and so on sequentially to 255. Next value is 0, then 1 and so on up to dataSize bytes transferred.
Data bytes are received into device, any number of them. For demonstration purposed data bytes are verified: they must be in sequence 0, 1, ..., 255, 0, 1, ... If not, SDO is aborted. If transfer is successfully finished then internal variable dataSize is set to number of data bytes transferred.
In the example we detect change of state of the OD variable (TPDO COS functionality).
CO_application.c shows the principle. In configuration phase extension is added to the OD entry with OD_extension_init().
Inside app_programRt() function OD_requestTPDO() is called on OD variables, when necessary.
If OD variable is mapped to any event triggered TPDO, then TPDO will be automatically sent, as specified in its communication parameters.
See CANopenLinux/README.md
By default program is compiled without gateway and in double threaded operation (mainline and RT thread). Macro CO_DRIVER_CUSTOM is defined, which includes CO_driver_custom.h into the foundation of all source files.
Note that several *.persist files are created in directory, from which demoLinuxDevice runs. These are files, which stores data blocks (from Object Dictionary). Directory for storage files can also be specified by program arguments. Each CANopen Linux device must use own directory for storage files.
cd demo make ./demoLinuxDevice can0 -i 4
See CANopenPIC/README.md
Program runs in Arduino style Max32 board with PIC32MX795F512L Microcontroller or in Explorer16 board. Prepare device as specified in CANopenPIC/README.md. Load demoDevice program, and connect to CANopen Network. Device runs with 250kbps with NodeId=4. First initialize the eeprom:
cocomm "4 w 0x1011 1 vs load" cocomm "4 reset node" cocomm "4 w 0x1010 1 vs save" cocomm "4 reset node"
Device has some peripherals enabled by default:
cocomm "4 w 0x1801 5 u16 500").See tutorial/README.md, chapter Next steps.